{kind=link}

Naukowcy sugerują, że robot-ryba zaprojektowany przez brytyjskich naukowców może ułatwić podwodną eksplorację.
Urządzenie, opracowane na Uniwersytecie w Bristolu, jest wyposażone w skręcony i zwinięty polimer (TCP), który napędza je do przodu.
Lekkie, niedrogie urządzenie działa na zasadzie kurczenia się mięśni po podgrzaniu, przekształcając energię w ruch mechaniczny, który również ogranicza jego prędkość.
TCP użyty w tej pracy jest podgrzewany przez przepuszczanie prądu przez przewodnik elektryczny w celu wytworzenia energii cieplnej, która podgrzewa przewodnik. Jest to proces zwany ogrzewaniem Joule’a.
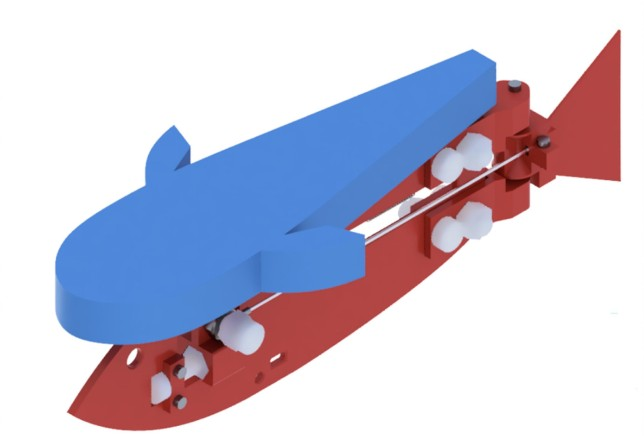
Poprzez zminimalizowanie odległości między TCP po jednej stronie ryby-robota a sprężyną po drugiej, aktywuje to płetwę z tyłu, umożliwiając rybie-robotowi osiągnięcie nowych prędkości.
Falujące trzepotanie jego tylnej płetwy zostało zmierzone przy częstotliwości 2 Hz, czyli dwóch fal na sekundę. Częstotliwość prądu elektrycznego jest taka sama, jak częstotliwość klapy ogonowej.
Robot ma 224 mm długości, w tym płetwę ogonową o długości 30 mm, i waży 49,7 g z pływakiem.
Odkrycia, opublikowane na konferencji RoboSoft 2023, wskazują na możliwość wykorzystania TCP o wysokiej częstotliwości w wodzie.
„Twór ze skręconego i zwiniętego polimeru (TCP) to obiecujący, nowatorski siłownik, który charakteryzuje się atrakcyjnymi właściwościami lekkości, niskim kosztem, wysoką gęstością energii i prostym procesem produkcyjnym” – powiedział naczelny autor Tsam Lung You z Wydziału Matematyki Inżynierskiej w Bristolu.
„Mogą być wykonane z bardzo łatwych do oceny materiałów, takich jak żyłka wędkarska. Jednak ze względu na czas potrzebny do rozproszenia ciepła w fazie relaksacji, powoduje to ich spowolnienie”.
Optymalizując projekt strukturalny antagonistycznej pary mięśni TCP-sprężyna, zbliżaj ich punkty zaczepienia do siebie, co umożliwiło wychylenie tylnej płetwy pod większym kątem przy tej samej liczbie aktywacji TCP.
Chociaż wymaga to większej siły, TCP jest silnym siłownikiem o dużej gęstości energii roboczej i jest w stanie napędzać płetwę.
Do tej pory TCP były używane głównie w aplikacjach takich jak urządzenia do noszenia i ręce robotów. Ta praca otwiera więcej obszarów zastosowań, w których można wykorzystać TCP, właśnie takich jak roboty morskie do podwodnej eksploracji i monitorowania.
„Nasza zrobotyzowana ryba pływała z największą częstotliwością uruchamiania, jaką można znaleźć w prawdziwej aplikacji TCP, a także z najwyższą jak dotąd prędkością poruszania się aplikacji TCP” – powiedział Lung You.
„To naprawdę ekscytujące, ponieważ otwiera więcej możliwości zastosowania protokołu TCP w różnych obszarach”.
Zespół planuje teraz rozszerzyć skalę i opracować robota z płetwami wstęgowymi inspirowanego rybami-nożami, który może zwinnie pływać w wodzie.